准确定位人员和物品的需求一直是带动企业发展的巨大经济推动力,也是消费者所期待的生活方式。据 Gartner 预测,到2030年,室内定位服务市场规模将达到550亿美元。针对最终应用的各类需求,超宽带(UWB)、低功耗蓝牙(Bluetooth® LE)及Wi-Fi等室内定位技术应运而生。最近,UWB凭借其卓越的定位精度、低延迟及强大的安全特性在商业领域得到广泛采纳。其通过类似雷达的脉冲传输实现厘米级定位精度,适用于从遗失物品搜寻到楼宇安全门禁,再到运动员成绩追踪,乃至室内导航等多种应用。 虽然UWB在微定位方面表现出色,但低功耗蓝牙凭借其低功耗、经济性和广泛的采纳度,在物联网生态系统中仍然不可或缺。作为短距个人局域网的事实标准,低功耗蓝牙运用多种技术进行定位计算,包括接收信号强度指示(RSSI)、到达角(AoA)和出发角(AoD)技术等,以提供距离及方位信息。此外,低功耗蓝牙即将引入一种称为“信道探测(CS)”的高精度测距技术,利用测量无线电信号间的相位差和/或无线电信号的飞行时间来估算距离,从而显著提高了定位精度。 本文将深入剖析UWB与低功耗蓝牙定位技术,探讨它们的特性、应用领域及最新进展。借助对比分析,文章聚焦于这些技术的精度、可靠性和安全性,旨在帮助企业、工业及消费领域应用(如室内定位、资产追踪或楼宇安全门禁等)选择最合适的技术。 首先,让我们从宏观视角来审视UWB技术与传统低功耗蓝牙RSSI、AoA、AoD以及低功耗蓝牙CS技术间的差异。表1对此进行了一些归纳,帮助您根据应用需求和产品设计要求,判断哪种技术最为匹配。
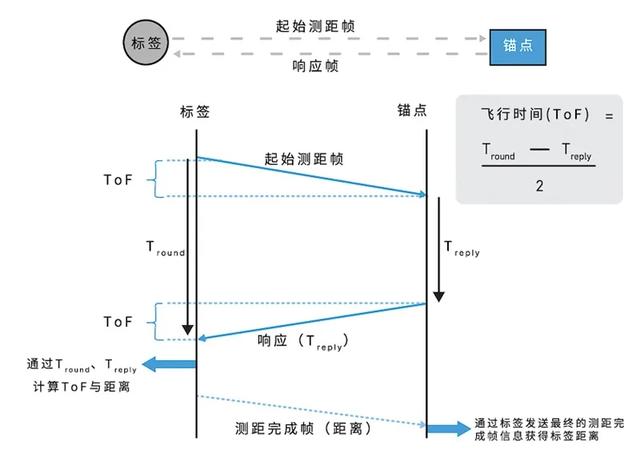
表1,UWB与低功耗蓝牙定位技术的比较 UWB的起源可追溯到20世纪初,而“超宽带(Ultra-Wideband)”这一术语则在1989年由美国政府提出,并在随后的几年里投入资金进行技术开发。最初,UWB仅限于军事用途,直到21世纪初才开始商业化。近二十年后,随着内置UWB U1芯片的苹果iPhone 11手机发布,UWB技术迎来大规模市场应用,如今它已嵌入智能手机、汽车和众多物联网设备中。 不同于其它技术,UWB专门设计用于实现精准、安全、实时的位置、距离和方向测量。正如其名,UWB采用极短的约2纳秒脉冲,在宽达500MHz的信道带宽上传输数据。工作在3.1-10.6GHz的频率范围内,它能够在远距离内以厘米级精度追踪目标。UWB通过飞行时间(ToF)计算距离,来获得如此级别的精度;其中ToF是指UWB脉冲在两个设备(如锚点和标签)间往返所需的时间。
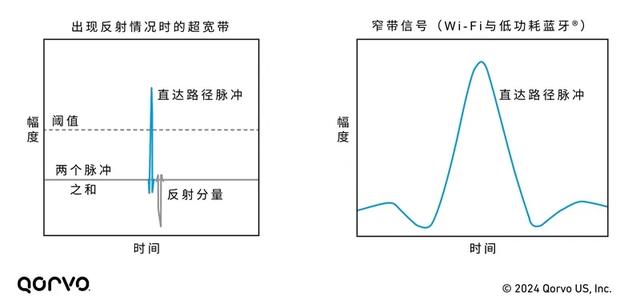
图1,UWB采用飞行时间技术测量两个设备间的距离 相较于幅度或频率调制载波信号,脉冲信号的采用让UWB系统能够更快地初始化链路并以较少的重复次数发送数据。如图2所示,左侧的UWB信号比右侧窄带信号具有显著更快的上升和下降时间,从而能够精确测量信号的到达时间,增强了对多径效应和其它无线电干扰的抗干扰能力。通过在宽频带上分散能量,并以-41.3dBm的极低功率水平进行传输,UWB对于像低功耗蓝牙这样的窄带无线电信号而言,就如同宽带噪声。
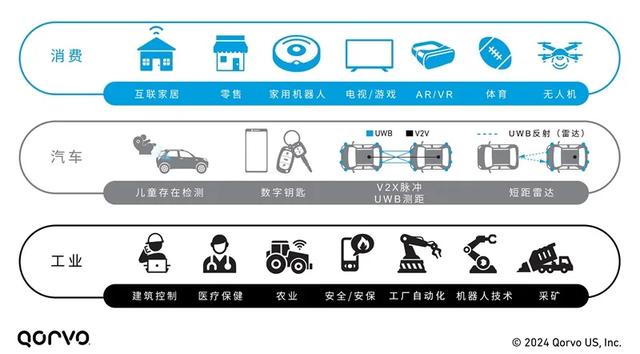
图2,出现反射情况的UWB脉冲无线电,与低功耗蓝牙窄带信号的对比 UWB可以采用多种不同的拓扑结构来实现,包括双向测距(TWR)、到达时间差(TDoA)和到达相位差(PDoA),从而在功耗、部署规模和成本方面带来灵活性与权衡。因此,测距可以在两台设备之间、多台(数千台)设备之间,或者在没有任何固定锚点基础设施的情况下进行。 此外,UWB信号传输极为安全,任何试图拦截和放大信号(如中继攻击)的行为都难以成功;使得UWB在信号空间中具有低检测概率、难以截获以及抗干扰的信号特性,让它成为下图中众多位置服务应用的理想选择。
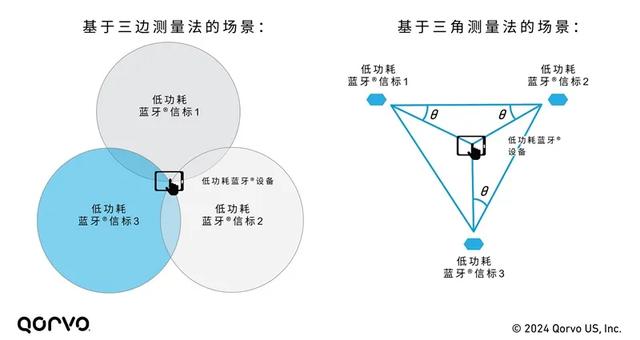
图3,UWB应用场景 人们越来越认识到,UWB技术作为一种多功能解决方案,价值不仅仅局限于测距,还具备固有的雷达功能——其可用作短距雷达系统,用于存在检测、手势识别甚至生命体征监测。这是通过在一个或多个接收天线上同时发射UWB雷达帧并接收信道脉冲响应(CIR)来实现的;随后,雷达算法通过分析CIR来感知数米外的运动、存在或手势。 自2004年问世以来,低功耗蓝牙已成为物联网领域的基石,其以低成本、长电池寿命和易于集成到消费品及服务中而备受赞誉。低功耗蓝牙在诸多应用中表现出色,从传统的音频流和数据传输,到汽车钥匙扣、智能家居小工具以及移动设备。其效率源于低功耗的特性、在2.4GHz频段40个信道上进行数据传输的能力,以及为大型设备网络构建网状网络的功能。 低功耗蓝牙定位系统的核心在于信标(Beacon)的应用。如图4所示,有两种技术用于位置估算——三边测量法和三角测量法。其中,三边测量作为最常用的方法,要求至少有两个已知距离的参考低功耗蓝牙信标,并使用RSSI来估算距离。另一方面,三角测量法则依赖于两个或三个参考点之间的已知距离,并通过测量角度——即AoA或AoD,来估算距离及方向。
图4,基于低功耗蓝牙的三边测量法和三角测量法定位估算 低功耗蓝牙5.1引入了基于三角测量法的定向技术,提供了两种定位估算方法:
如今,得益于创新的“信道探测”技术,低功耗蓝牙超越了RSSI、AoA/AoD等方法,在定位能力上取得新的突破。这项新技术代表了低功耗蓝牙测距方式的重大飞跃;它采用相位测距(PBR)和往返时间(RTT)两种方法来准确确定两个低功耗蓝牙设备间的距离。通过发送并分析不同频率下无线信号的相位变化,PBR能够实现亚米级的定位准确度,从而带来更精确的距离估算。另一方面,基于无线电信号ToF的RTT提供了增强的安全性(时间延迟更难被破解)、更大的测距范围,并可在信道探测过程中与PBR一起使用。 低功耗蓝牙信道探测(CS)技术引入了新的物理层;相较于传统的40个信道,它使用72个信道上的振幅位移键控调制。同时,这一技术还被集成至低功耗蓝牙协议栈负责信道探测设置、定时与安全的链路层中。 让我们用简化的语言理解低功耗蓝牙CS中PBR的工作原理。如图5所示,设备A向设备B发送一个无线信号,设备B检测信号相位并将其回传给设备A;随后,设备A比较发送信号与接收信号的相位差异来计算信号传输的距离。通过在不同频率上执行这一操作,低功耗蓝牙设备便能够利用相位信息精确测量距离。 图5,低功耗蓝牙信道探测的相位测距技术 低功耗蓝牙CS被定位为比低功耗蓝牙RSSI更 |