一、技术路线分类与核心特点- 单车智能路线(模块化架构)
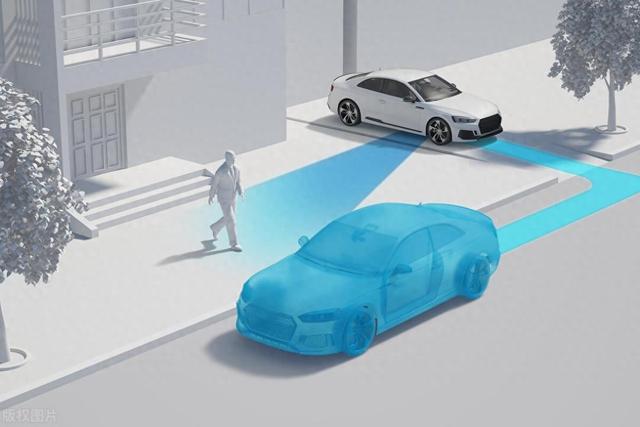
• 技术逻辑:依赖车辆自身传感器(激光雷达、摄像头、毫米波雷达等)和车载计算平台实现环境感知、决策与控制,强调独立智能化。
• 典型方案:
◦ 纯视觉方案(如特斯拉FSD):通过8摄像头+端到端AI模型实现,成本低但极端天气性能受限。
◦ 多传感器融合方案(如华为ADS 3.0、小鹏XNGP):结合激光雷达与视觉冗余,提升安全性但硬件成本较高。
• 优点:灵活性高,无需依赖外部基础设施;数据积累快,通过海量用户数据优化算法。
• 缺点:极端天气下感知能力受限(如暴雨中视觉识别率下降);激光雷达等高成本传感器制约规模化应用。 - 车路协同路线(端到端协同架构)
• 技术逻辑:通过车辆与道路设施(智能信号灯、路侧单元)、云端平台协同交互,实现全局优化。
• 典型方案:
◦ V2X车联网:依托5G通信与高精度地图,优化交通流量(如北京亦庄试点路段通行效率提升25%)。
◦ 车路端到端协同:跳过传统分模块处理,直接通过AI模型实现输入到输出的映射。
• 优点:安全性强,通过路侧设备弥补单车感知盲区(如武汉试点事故率下降40%);系统效率高,优化全局交通。
• 缺点:依赖大规模基建投入(如智能道路改造成本高);跨区域设备兼容性与标准化难度大。 - 混合路线(技术融合趋势)
• 技术逻辑:结合单车智能与车路协同优势,例如“高精度地图+激光雷达+车联网”方案。
• 应用场景:适用于复杂城市道路与高速场景,例如百度Apollo的Robotaxi同时依赖单车感知与云端调度。
• 优点:冗余性高,降低单一系统失效风险;符合政策对安全性的强制要求。
• 缺点:技术整合复杂,需平衡传感器成本与通信延迟。
二、技术应用现状与典型案例- L2级辅助驾驶普及化
• 渗透率:2023年中国新能源乘用车L2级渗透率达50.56%,功能涵盖自适应巡航、车道保持等。
• 代表企业:比亚迪、吉利等车企标配L2级功能,特斯拉FSD在全球超40万用户中应用。 - L3级有条件自动驾驶试点
• 政策支持:2024年中国批准9家车企(长安、蔚来等)开展L3级上路试点,覆盖50个城市。
• 典型案例:小马智行在北京高快速路推进“无人化测试”,主驾驶位无需安全员。 - L4级高度自动驾驶场景落地
• 物流与港口:京东无人配送车、天津港无人集装箱卡车提升运输效率。
• Robotaxi:百度“萝卜快跑”在武汉、北京运营,累计里程超5000万公里。
三、技术发展挑战与未来趋势- 核心挑战
• 技术瓶颈:极端天气(浓雾、暴雨)下传感器性能下降,激光雷达探测距离缩短50%。
• 法规滞后:L3级事故责任划分模糊,数据隐私与网络安全缺乏统一标准。
• 成本压力:L4级单车改造成本超10万美元,制约商业化推广。 - 未来趋势
• 技术突破:大模型与端到端AI优化决策算法(如特斯拉FSD V12接管里程达333英里);固态激光雷达量产(单价降至1000元以下)。
• 政策完善:中国计划2025年建成10万公里智能道路,欧盟推动碳排放法规倒逼技术升级。
• 场景扩展:从乘用车向物流、公共交通(如西安无人驾驶地铁)等多领域渗透。
总结:自动驾驶技术路线呈现“单车智能主导当前,车路协同布局未来”的格局。L2级已大规模普及,L3/L4级在政策支持下加速试点,但技术可靠性、法规完善度仍是关键瓶颈。未来竞争将聚焦端到端模型优化、车路云一体化整合与低成本化突破。 | 















19款电子扎带
电路板识别电子标签